OpenPi π₀.₅ on Jetson Thor
Deploy Physical Intelligence's OpenPi π₀.₅ Vision-Language-Action (VLA) model on NVIDIA Jetson AGX Thor with TensorRT NVFP4 quantization for low-latency end-to-end inference.
 Aditya Sahu
Aditya Sahu Deploy Physical Intelligence’s OpenPi π₀.₅ Vision-Language-Action (VLA) model on NVIDIA Jetson AGX Thor with TensorRT NVFP4 quantization for low-latency end-to-end inference.
What is OpenPi π₀.₅?
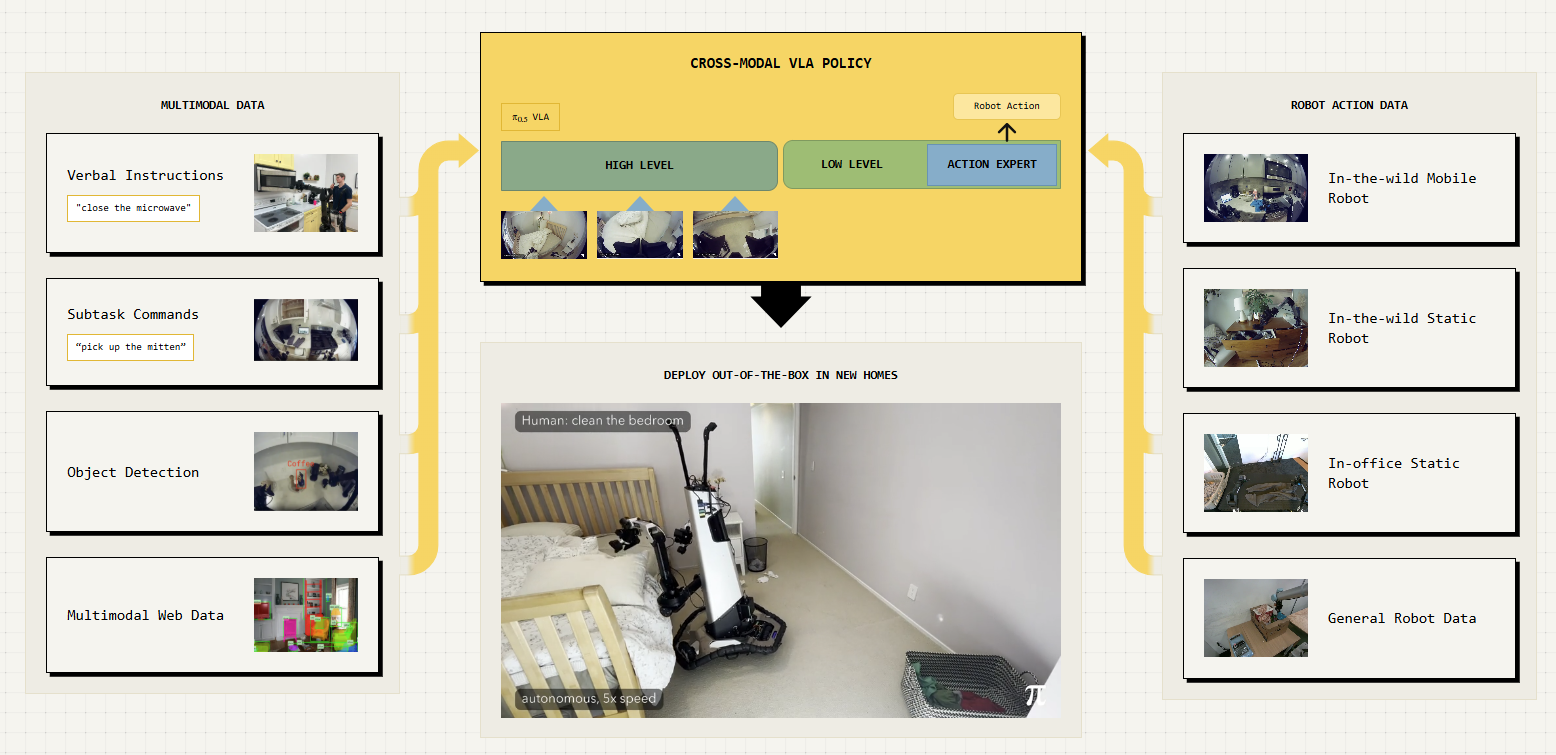
OpenPi is Physical Intelligence’s open-source robotics model repository. The π₀.₅ model is a flow-matching Vision-Language-Action (VLA) model pre-trained on 10,000+ hours of robot data. It takes camera images and a natural-language instruction as input and outputs robot actions — enabling language-conditioned robotic manipulation.
Why Jetson AGX Thor?
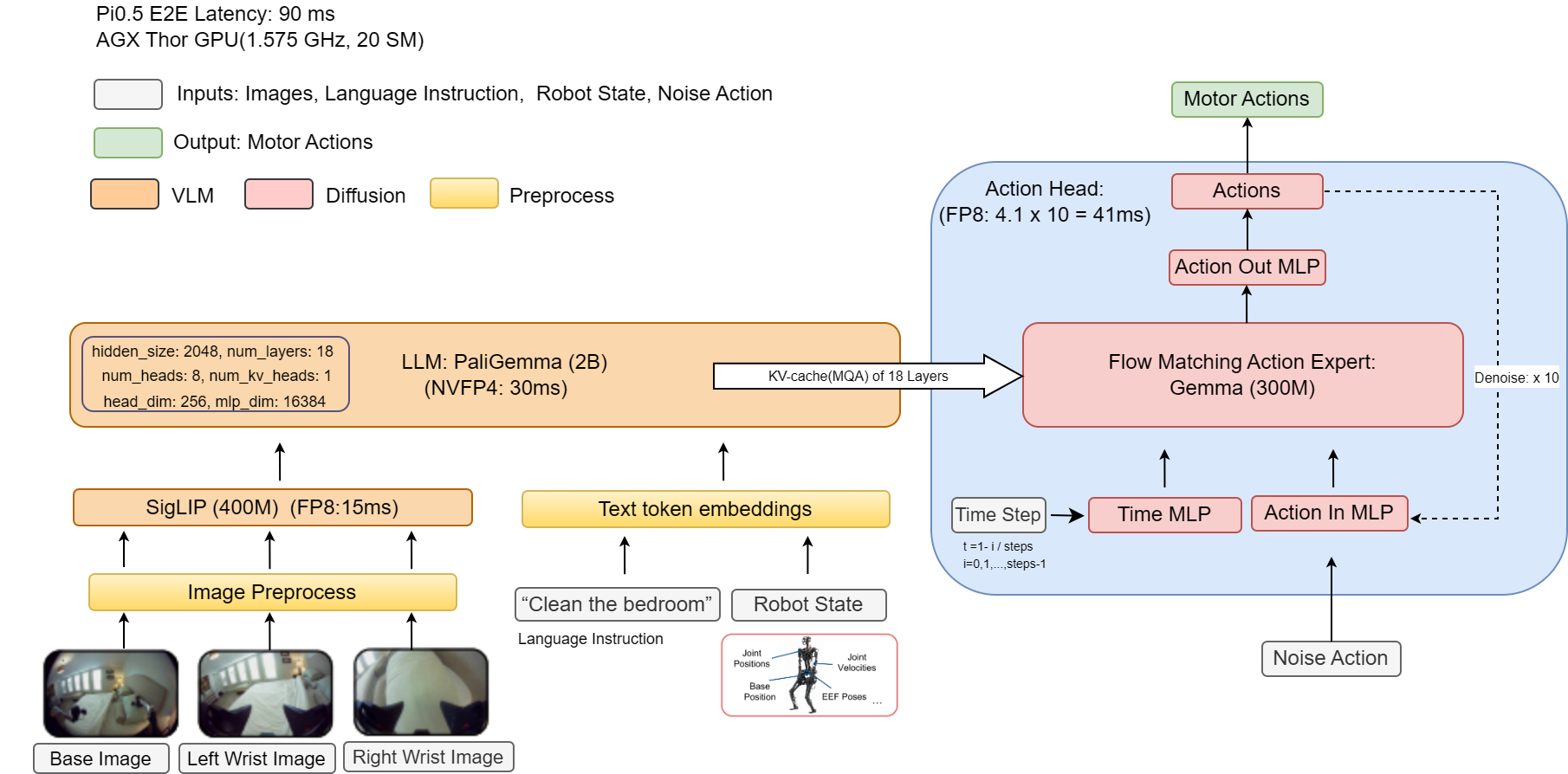
VLA models are computationally demanding, they fuse vision encoders, language models and action decoders into a single pipeline that must run at real-time control rates. Jetson AGX Thor brings Blackwell-class GPU compute with up to 128GB of unified memory, giving it the headroom to run these large multimodal models entirely on-device. Combined with TensorRT acceleration and FP8/NVFP4 precision support, Thor can deliver the throughput needed for closed-loop robotic control without relying on a separate GPU server.
Pipeline Overview
JAX Checkpoint ──► PyTorch ──► ONNX (FP8 + NVFP4) ──► TensorRT Engine ──► Inference| Stage | What happens |
|---|---|
| 1. JAX → PyTorch | Convert original JAX/Flax weights to PyTorch SafeTensors |
| 2. PyTorch → ONNX | Export with FP8/NVFP4 quantization via NVIDIA ModelOpt |
| 3. ONNX → TensorRT | Compile optimized engine with trtexec |
| 4. Inference | Run the TensorRT engine for low-latency inference |
Performance
Benchmarked on Jetson AGX Thor Developer Kit (JetPack 7.x, MAXN power mode):
| Inference Backend | Total Latency (ms) | Model Latency (ms) | Speedup |
|---|---|---|---|
| PyTorch BF16 | ~163 | ~158 | 1.0x |
| TensorRT FP8 | ~95 | ~91 | 1.71x |
| TensorRT FP8 + NVFP4 | ~94 | ~90 | 1.73x |
Prerequisites
Hardware
- NVIDIA Jetson AGX Thor Developer Kit
- NVMe SSD recommended (model weights are ~6 GB+)
Software
| Component | Required Version |
|---|---|
| JetPack | 7.x (L4T R38.x) — tested with JP 7.0 and 7.1 |
| CUDA | 13.0 |
| Docker | 28.x+ |
| NVIDIA Container Toolkit | 1.18+ |
Check your setup:
cat /etc/nv_tegra_release # Should show R38 nvidia-smi # Should show CUDA 13.0, Thor GPU docker --version # Docker 28.x dpkg-query -W nvidia-container-toolkit
Step 1: Set Jetson to Maximum Performance
Boost all clocks and disable GPU power gating for consistent benchmark results.
# Set maximum performance power mode
sudo nvpmodel -m 0
# Lock all clocks to maximum frequency
sudo jetson_clocks
# Disable GPU railgate
sudo sh -c 'echo on > /sys/bus/pci/devices/0000:01:00.0/power/control'Verify with:
sudo jetson_clocks --showStep 2: Clone the OpenPi Repository
The deployment scripts in this tutorial were tested against a specific commit of the OpenPi repo. Pin to that commit for reproducibility:
git clone --recurse-submodules https://github.com/Physical-Intelligence/openpi.git
cd openpi
git checkout 175f89c3Tip: You can try the latest
mainbranch (git checkout main) if you want the newest features, but if something breaks during conversion or export, fall back to the pinned commit above.
Step 3: Download Jetson Thor Deployment Scripts
The OpenPi repo does not include the Jetson Thor deployment scripts by default. Download them into the cloned repo:
wget -qO- https://www.jetson-ai-lab.com/code-samples/openpi_on_thor/download.sh | bashThis downloads the Dockerfile, inference scripts, ONNX export tools, and TensorRT engine builder into the openpi_on_thor/ folder.
Verify:
ls openpi_on_thor/
# thor.Dockerfile pyproject.toml pi05_inference.py pytorch_to_onnx.py
# build_engine.sh trt_model_forward.py trt_torch.py calibration_data.py
# patches/apply_gemma_fixes.pyStep 4: Build the Docker Image for Jetson Thor
The Dockerfile at openpi_on_thor/thor.Dockerfile uses the NVIDIA PyTorch container as the base and installs all dependencies from the Jetson AI Lab pip index.
sudo docker build -t openpi-pi0.5:latest -f openpi_on_thor/thor.Dockerfile .Note: The first build takes 15–20 minutes. Subsequent builds use Docker cache and are much faster.
What the Dockerfile does (click to expand)
- Base image:
nvcr.io/nvidia/pytorch:25.09-py3(PyTorch + CUDA + TensorRT + ModelOpt pre-installed) - Pip index:
https://pypi.jetson-ai-lab.io/sbsa/cu130(precompiled aarch64 wheels) - Installs: OpenPi with
[thor]extras — includesonnx,onnxruntime,onnx_graphsurgeon,nvtx,torchcodec,diffusers, and more - Extra deps:
chex,toolz(installed with--no-depsto avoid JAX/NumPy conflicts),onnxslim(for ONNX optimization),lerobot(pinned to a specific commit for API compatibility) - System packages: ffmpeg, OpenCV dependencies, build tools
Step 5: Launch the Docker Container
sudo docker run --rm -it --runtime nvidia \
-v "$PWD":/workspace \
-v "$HOME/.cache/openpi":/root/.cache/openpi \
-w /workspace \
-p 8000:8000 \
openpi-pi0.5:latestTip: The
-v "$HOME/.cache/openpi":/root/.cache/openpimount persists downloaded checkpoints, converted models, and TensorRT engines across container restarts. Without it, you’d need to re-download and re-convert everything each time.
You are now inside the container. All remaining steps run inside this shell.
Step 6: Configure the Environment (Inside Container)
6.1 Set PYTHONPATH
export PYTHONPATH=packages/openpi-client/src:src:.:$PYTHONPATH6.2 Choose a Model Config
Pick the config name for your target robot/task. We’ll use pi05_libero as the running example.
export CONFIG_NAME=pi05_liberoAvailable configs:
| Config Name | Robot Platform | Description |
|---|---|---|
pi05_libero | LIBERO (sim) | Fine-tuned for LIBERO benchmark tasks |
pi05_droid | DROID (Franka) | Fine-tuned on DROID dataset, good generalization |
pi05_aloha | ALOHA | For bimanual ALOHA platforms |
6.3 Apply Transformers Library Patches
OpenPi requires patched versions of several HuggingFace Transformers files (for AdaRMS normalization, precision control, and KV cache behavior).
cp -r ./src/openpi/models_pytorch/transformers_replace/* \
/usr/local/lib/python3.12/dist-packages/transformers/6.4 Apply ONNX/TRT Compatibility Fixes
The upstream transformers patches need two small fixes for TensorRT NVFP4 export:
GemmaRMSNorm.extra_repr()— add a guard so ONNX tracing doesn’t crash when theweightattribute is absent (adaptive-norm layers use.denseinstead).GemmaAttention.forward()— replacereshape(*input_shape, -1)with an explicit dimension (num_attention_heads * head_dim). Without this, all dimensions appear dynamic in the ONNX graph and TensorRT’s FP4 block quantization fails.
python openpi_on_thor/patches/apply_gemma_fixes.pyExpected output:
Applying ONNX/TRT compatibility fixes to modeling_gemma.py...
[1/2] Applied hasattr guard in GemmaRMSNorm.extra_repr()
[2/2] Applied explicit reshape dimension in GemmaAttention.forward()
Patched: /usr/local/lib/python3.12/dist-packages/transformers/models/gemma/modeling_gemma.py
Done.Step 7: Download the JAX Checkpoint
The model checkpoints are stored on Google Cloud Storage and are downloaded automatically. The download includes both the model parameters and normalization assets.
python -c "
import os
from openpi.shared import download
config_name = os.getenv('CONFIG_NAME')
checkpoint_dir = download.maybe_download(f'gs://openpi-assets/checkpoints/{config_name}')
print(f'Checkpoint downloaded to: {checkpoint_dir}')
"The checkpoint will be cached at ~/.cache/openpi/openpi-assets/checkpoints/${CONFIG_NAME}/.
Step 8: Convert JAX Checkpoint to PyTorch
Convert the original JAX/Flax checkpoint to PyTorch SafeTensors format:
python examples/convert_jax_model_to_pytorch.py \
--config-name ${CONFIG_NAME} \
--checkpoint-dir ~/.cache/openpi/openpi-assets/checkpoints/${CONFIG_NAME} \
--output-path ~/.cache/openpi/openpi-assets/checkpoints/${CONFIG_NAME}_pytorchImportant:
--output-pathmust be a directory path, not a file path. The script createsmodel.safetensorsandconfig.jsoninside it automatically.
This takes ~5–10 minutes. When complete, you’ll see:
Model conversion completed successfully!
Model saved to /root/.cache/openpi/openpi-assets/checkpoints/pi05_libero_pytorchCopy the normalization assets into the PyTorch checkpoint directory (the conversion script does not copy them automatically):
cp -r ~/.cache/openpi/openpi-assets/checkpoints/${CONFIG_NAME}/assets \
~/.cache/openpi/openpi-assets/checkpoints/${CONFIG_NAME}_pytorch/The output directory now contains:
model.safetensors— PyTorch weightsconfig.json— model architecture metadataassets/— normalization stats (needed for inference)
Step 9: (Optional) Verify PyTorch Inference
Before quantizing, confirm the PyTorch model works correctly:
python openpi_on_thor/pi05_inference.py \
--config-name ${CONFIG_NAME} \
--checkpoint-dir ~/.cache/openpi/openpi-assets/checkpoints/${CONFIG_NAME}_pytorch \
--inference-mode pytorch \
--num-warmup 3 \
--num-test-runs 5Expected output (~163 ms per inference on Thor, MAXN mode):
============================================================
Results:
============================================================
Actions shape: (10, 7)
Actions range: [-0.4826, 0.9994]
Total inference time: 162.64 ± 0.37 ms
(min: 162.34, max: 163.32)
Model inference time: 157.94 ± 0.35 ms
(min: 157.63, max: 158.60)Step 10: Export to ONNX with NVFP4 Quantization
This step converts the PyTorch model to ONNX format with FP8 + NVFP4 quantization using NVIDIA ModelOpt:
python openpi_on_thor/pytorch_to_onnx.py \
--checkpoint_dir ~/.cache/openpi/openpi-assets/checkpoints/${CONFIG_NAME}_pytorch \
--output_path ~/.cache/openpi/openpi-assets/checkpoints/${CONFIG_NAME}_pytorch \
--config_name ${CONFIG_NAME} \
--precision fp8 \
--enable_llm_nvfp4 \
--quantize_attention_matmulWhat happens:
- Model is loaded and patched for TensorRT-compatible export
- Calibration data is loaded (from the dataset) for FP8 quantization
- Attention matmul operations get QDQ nodes inserted
- LLM layers are quantized to NVFP4 precision and converted to 2DQ format
- ONNX model is exported with
dynamo=False(legacy TorchScript tracer), dynamic axes, and external data
The ONNX model is saved to:
~/.cache/openpi/openpi-assets/checkpoints/${CONFIG_NAME}_pytorch/onnx/model_fp8_nvfp4.onnxOther precision options (click to expand)
| Flag | Precision | Latency | Notes |
|---|---|---|---|
--precision fp8 --quantize_attention_matmul | FP8 | ~95 ms | Good accuracy/speed tradeoff |
--precision fp8 --enable_llm_nvfp4 --quantize_attention_matmul | FP8 + NVFP4 | ~94 ms | Recommended — best latency |
Note: Pure FP16 (
--precision fp16) is not supported. The Pi0.5 model uses BF16 natively (8-bit exponent). FP16 has a much smaller dynamic range (5-bit exponent), causing overflow in the Gemma attention layers that compounds over the denoising loop.
Step 11: Build TensorRT Engine
Compile the ONNX model into a TensorRT engine using trtexec:
ACTION_HORIZON=10 bash openpi_on_thor/build_engine.sh \
~/.cache/openpi/openpi-assets/checkpoints/${CONFIG_NAME}_pytorch/onnx/model_fp8_nvfp4.onnx \
~/.cache/openpi/openpi-assets/checkpoints/${CONFIG_NAME}_pytorch/engine/model_fp8_nvfp4.engineNote:
ACTION_HORIZON=10matches the default forpi05_libero. Adjust if using a different config (checkconfig.model.action_horizon).
This step takes 10–30 minutes on Thor as trtexec optimizes the graph, selects kernels, and compiles CUDA code. The build log is saved alongside the engine file.
When complete:
TensorRT engine built successfully!
Engine: ~/.cache/.../engine/model_fp8_nvfp4.engineStep 12: Run TensorRT NVFP4 Inference
Run the optimized TensorRT engine:
python openpi_on_thor/pi05_inference.py \
--config-name ${CONFIG_NAME} \
--checkpoint-dir ~/.cache/openpi/openpi-assets/checkpoints/${CONFIG_NAME}_pytorch \
--engine-path ~/.cache/openpi/openpi-assets/checkpoints/${CONFIG_NAME}_pytorch/engine/model_fp8_nvfp4.engine \
--inference-mode tensorrt \
--num-warmup 3 \
--num-test-runs 10Expected output (~96 ms on Thor, MAXN mode):
============================================================
Results:
============================================================
Actions shape: (10, 7)
Actions range: [-0.3147, 0.8649]
Total inference time: 96.42 ± 0.33 ms
(min: 95.98, max: 96.91)
Model inference time: 91.99 ± 0.26 ms
(min: 91.70, max: 92.54)Step 13: (Optional) Compare PyTorch vs TensorRT
The inference script has a built-in comparison mode that runs both backends with identical inputs and reports accuracy differences:
python openpi_on_thor/pi05_inference.py \
--config-name ${CONFIG_NAME} \
--checkpoint-dir ~/.cache/openpi/openpi-assets/checkpoints/${CONFIG_NAME}_pytorch \
--engine-path ~/.cache/openpi/openpi-assets/checkpoints/${CONFIG_NAME}_pytorch/engine/model_fp8_nvfp4.engine \
--inference-mode compare \
--num-warmup 3 \
--num-test-runs 10Expected comparison output:
Cosine Similarity:
- Overall: 0.99557564
- Per-timestep Mean: 0.99580561
- Per-timestep Min: 0.99352367
- Per-timestep Max: 0.99797150
Speedup:
- Total: 1.71x
- Model: 1.75xKey metrics:
- Cosine similarity > 0.99 across all timesteps confirms the TRT engine faithfully reproduces PyTorch behavior
- 1.7× speedup over PyTorch BF16 inference
Step 14: (Optional) Launch Inference Server
For production robotics deployment, launch a WebSocket policy server that robots can query over the network:
python openpi_on_thor/serve_policy.py \
--use-tensorrt \
--tensorrt-engine ~/.cache/openpi/openpi-assets/checkpoints/${CONFIG_NAME}_pytorch/engine/model_fp8_nvfp4.engine \
--port 8000 \
policy:checkpoint \
--policy.config=${CONFIG_NAME} \
--policy.dir=~/.cache/openpi/openpi-assets/checkpoints/${CONFIG_NAME}_pytorchNote: This uses
openpi_on_thor/serve_policy.pywhich extends OpenPi’sserve_policy.pywith TensorRT support. To serve without TensorRT (PyTorch only), omit--use-tensorrtand--tensorrt-engine.
The server listens on 0.0.0.0:8000 and accepts observations via WebSocket. A robot client can then query it:
from openpi_client import websocket_client_policy
# Connect to the inference server running on Thor
policy = websocket_client_policy.WebsocketClientPolicy(
host="<THOR_IP_ADDRESS>",
port=8000,
)
# Send an observation and get actions back
action_chunk = policy.infer({
"observation/image": camera_image, # (224, 224, 3) uint8
"observation/wrist_image": wrist_image, # (224, 224, 3) uint8
"observation/state": robot_state, # (8,) float32
"prompt": "pick up the red block",
})
actions = action_chunk["actions"] # (10, 7) action trajectoryTroubleshooting
| Issue | Solution |
|---|---|
docker build fails pulling base image | Ensure network access to nvcr.io. Try docker login nvcr.io |
trtexec not found | It should be at /usr/src/tensorrt/bin/trtexec inside the container |
| TensorRT engine build OOM | Reduce MAX_BATCH to 1 in build_engine.sh |
fp16 precision has been set...but fp16 is not configured | The build_engine.sh script needs --fp16 --fp8 flags for trtexec. Ensure you’re using the latest version. |
ONNX export GemmaRMSNorm AttributeError | The pytorch_to_onnx.py script uses dynamo=False to avoid this. Ensure you’re using the latest openpi_on_thor/ scripts. |
| ONNX export fails | Ensure transformers patches were applied (Step 6.3) and PYTHONPATH is set (Step 6.1) |
ModuleNotFoundError: No module named 'openpi' | PYTHONPATH is not set. Run Step 6.1: export PYTHONPATH=packages/openpi-client/src:src:.:$PYTHONPATH |
ModuleNotFoundError: No module named 'chex' | Run pip install chex --no-deps && pip install toolz --no-deps. Do NOT omit --no-deps — it will upgrade jax/numpy and break the environment. The Dockerfile already includes this fix. |
No module named 'onnxslim' | Run pip install onnxslim inside the container. The Dockerfile already includes this. |
NVFP4 TRT_FP4DynamicQuantize blocked axis error | The Gemma attention reshape uses -1 which makes dims appear dynamic. Run Step 6.4 (apply_gemma_fixes.py) to replace with explicit dims. |
NVFP4 TRT_FP4QDQ / fp4qdq_to_2dq not found | ModelOpt in 26.01-py3 may lack fp4qdq_to_2dq. Use 25.09-py3 base image (default) which includes full NVFP4 support. |
| Checkpoint download fails | Check internet connectivity; GCS URLs require no auth for public checkpoints |
| GPU railgate re-enables after reboot | Re-run the echo on > .../power/control command after each boot |
ImportError: modelopt | Ensure you’re using the [thor] Docker image; nvidia-modelopt is pre-installed |
| Low cosine similarity (< 0.99) in compare mode | Ensure you built the engine with --stronglyTyped (the default build_engine.sh includes this) and are using the latest pytorch_to_onnx.py which performs denoising-loop accumulation in FP32. Re-export ONNX and rebuild the engine. |
| HuggingFace dataset download needs token | Set export HF_TOKEN=<your_token> if using --use-dataset flag |