Tutorial - NanoOWL
Let's run NanoOWL , OWL-ViT optimized to run real-time on Jetson with NVIDIA TensorRT .

What you need
-
One of the following Jetson:
Jetson AGX Orin (64GB) Jetson AGX Orin (32GB) Jetson Orin NX (16GB) Jetson Orin Nano (8GB)
-
Running one of the following versions of JetPack :
JetPack 5 (L4T r35.x) JetPack 6 (L4T r36.x)
-
NVMe SSD highly recommended for storage speed and space
-
7.2 GBfor container image - Spaces for models
-
-
Clone and setup
jetson-containers:git clone https://github.com/dusty-nv/jetson-containers bash jetson-containers/install.sh
How to start
Use the
jetson-containers run
and
autotag
commands to automatically pull or build a compatible container image.
jetson-containers run --workdir /opt/nanoowl $(autotag nanoowl)
How to run the tree prediction (live camera) example
-
Ensure you have a camera device connected
ls /dev/video*If no video device is found, exit from the container and check if you can see a video device on the host side.
-
Install missing module.
pip install aiohttp -
Launch the demo
cd examples/tree_demo python3 tree_demo.py --camera 0 --resolution 640x480 \ ../../data/owl_image_encoder_patch32.engineOption Description Example --cameraTo specify camera index (corresponds to /dev/video*) when multiple cameras are connected1--resolutionTo specify the camera open resolution in the format {width}x{height}640x480Info
If it fails to find or load the TensorRT engine file, build the TensorRT engine for the OWL-ViT vision encoder on your Jetson device.
python3 -m nanoowl.build_image_encoder_engine \ data/owl_image_encoder_patch32.engine -
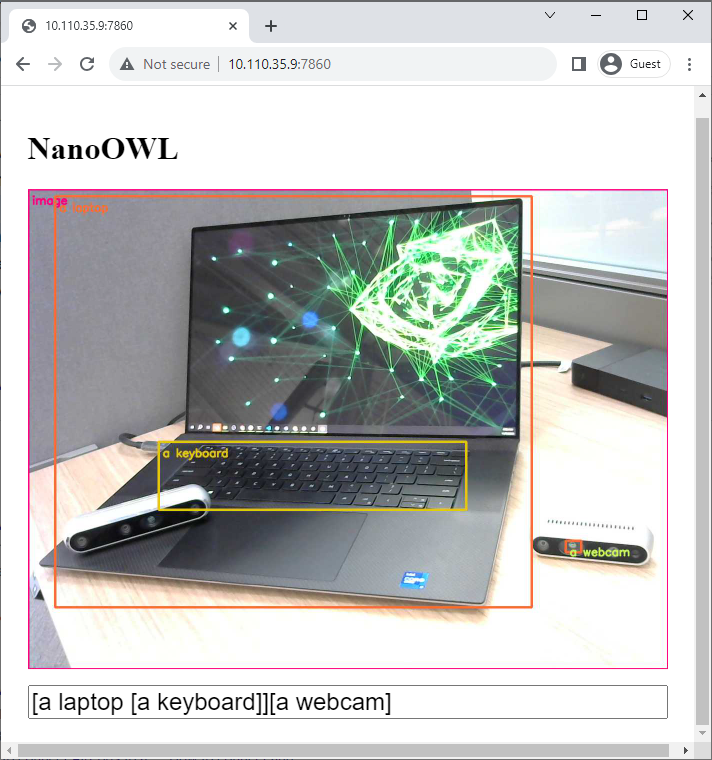
Second, open your browser to
http://<ip address>:7860 -
Type whatever prompt you like to see what works!
Here are some examples
-
Example:
[a face [a nose, an eye, a mouth]] -
Example:
[a face (interested, yawning / bored)] -
Example:
(indoors, outdoors)
-
Example:
Result